خودکار اسمبلی، معائنہ، مشینی، اور پیکیجنگ لائنوں میں، عین مطابق، قابل اعتماد، اور موثر وقفے وقفے سے منتقلی اور متعدد اسٹیشنوں کے درمیان ورک پیس کی پوزیشننگ کا حصول پیداوار کی کارکردگی اور معیار کو بڑھانے کی کلید ہے۔ کیم انڈیکسر (جسے کیم ڈیوائیڈر بھی کہا جاتا ہے) اور ہولو انڈیکسنگ ٹیبل دو بنیادی میکانزم ہیں جو اس فنکشن کو پورا کرتے ہیں۔ ان کے مختلف اصولوں اور خصوصیات کی وجہ سے، ہر ایک کو مخصوص اطلاق کے علاقوں میں ناقابل تلافی فوائد حاصل ہیں۔
一،کیم انڈیکسر (کیم ڈیوائیڈر)
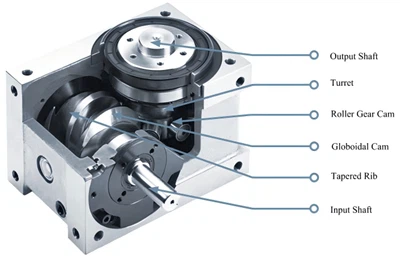
کیم انڈیکسر خالصتاً مکینیکل وقفے وقفے سے حرکت کرنے والا میکانزم ہے۔ اس کا بنیادی حصہ ان پٹ شافٹ پر منحنی سطح کی کیم اور آؤٹ پٹ برج پر درست رولرس (فالورز) کے درمیان کنجوگیٹ میشنگ میں ہے۔


کام کرنے کا اصول: سروو موٹر یا معیاری موٹر ان پٹ شافٹ کی مسلسل گردش کو چلاتی ہے۔ کیم پروفائل کا وکر رولرس کو زبردستی دھکیلتا ہے، مسلسل روٹری ان پٹ کو وقفے وقفے سے انڈیکسنگ گردش (انڈیکس-ڈول-انڈیکس) آؤٹ پٹ شافٹ میں تبدیل کرتا ہے۔
بنیادی تعمیر:
خمیدہ سطح کیم:ہموار حرکت کے منحنی خطوط (مثال کے طور پر، ترمیم شدہ سائن، ترمیم شدہ trapezoidal) کو یقینی بنانے کے لیے درست طریقے سے حساب اور مشینی، ہموار سرعت کی منتقلی کو قابل بنانا اور اثر کو کم کرنا۔
رولر برج:متعدد درستگی والی سوئی رولر بیرنگ یکساں طور پر تقسیم کیے جاتے ہیں، جو کیم کے ساتھ ملٹی-پوائنٹ رابطہ بناتے ہیں، زیادہ بوجھ کی گنجائش اور سختی پیش کرتے ہیں۔
ہاؤسنگ:اونچی-طاقت والے کاسٹ آئرن یا کاسٹ اسٹیل سے بنا، مجموعی طور پر سختی کو یقینی بناتا ہے۔
حرکت کی خصوصیات:حرکت کا قانون (ڈیول-ٹو-انڈیکس ٹائم ریشو، ایکسلریشن وکر) کا تعین موشن کریو سے ہوتا ہے۔ ایک بار منتخب ہونے کے بعد، یہ طے شدہ اور ناقابل تبدیلی ہے۔ اس کے رہنے کی مدت میکانیکل سیلف-لاکنگ کی خصوصیت رکھتی ہے، جس سے یہ اضافی برکی کے بغیر اہم ریڈیل/محوری بوجھ کو برداشت کرنے کی اجازت دیتا ہے۔

2، کھوکھلااشاریہ سازیٹیبل (Servoاشاریہ سازیمیز)
کھوکھلی اشاریہ سازی کی میز ایک میچیٹرونک، اعلیٰ- درست اشاریہ سازی کا آلہ ہے۔ یہ بنیادی طور پر ایک ماڈیولر پروڈکٹ ہے جس میں ایک اعلی-ٹارک سرو موٹر، ایک اعلی-ریگیڈیٹی درستگی کی رفتار کم کرنے والا (عام طور پر سیاروں یا ہارمونک ڈرائیو)، اور ایک اعلی-ریزولوشن انکوڈر کو شامل کیا جاتا ہے۔

کام کرنے کا اصول:میزبان کنٹرولر (PLC یا موشن کنٹرولر) سروو ڈرائیو کو پلس یا کمیونیکیشن کمانڈ بھیجتا ہے، جو سروو موٹر کو گھمانے کے لیے چلاتا ہے۔ ٹارک کو بڑھایا جاتا ہے اور رفتار کم کرنے والے کے ذریعے درستگی کو بڑھایا جاتا ہے، بالآخر آؤٹ پٹ ڈسک کو مخصوص زاویہ پر گھومنے کے لیے چلاتا ہے۔
کام کرنے کا اصول:میزبان کنٹرولر (PLC یا موشن کنٹرولر) سروو ڈرائیو کو پلس یا کمیونیکیشن کمانڈ بھیجتا ہے، جو سروو موٹر کو گھمانے کے لیے چلاتا ہے۔ ٹارک کو بڑھایا جاتا ہے اور رفتار کم کرنے والے کے ذریعے درستگی کو بڑھایا جاتا ہے، بالآخر آؤٹ پٹ ڈسک کو مخصوص زاویہ پر گھومنے کے لیے چلاتا ہے۔
بنیادی تعمیر:
ہائی-صحت سے متعلق رفتار کم کرنے والا
بنیادی ٹرانسمیشن جزو، ہائی ٹارک آؤٹ پٹ اور انتہائی کم بیکلاش (حتی کہ صفر بیکلاش) کے لیے ایک اعلی کمی کا تناسب فراہم کرتا ہے۔
مطلق انکوڈر
پوزیشننگ کی درستگی کو یقینی بناتے ہوئے، بند-لوپ کنٹرول کے لیے اعلی-ریزولوشن فیڈ بیک فراہم کرتا ہے۔
کھوکھلی شافٹ کی ساخت
صاف کیبل کے انتظام کے لیے لائنوں (نیومیٹک، الیکٹریکل، وژن کیبلز) کے گزرنے میں سہولت فراہم کرتے ہوئے، سوراخ کے ذریعے ایک بڑا سینٹرل- نمایاں کرتا ہے۔
حرکت کی خصوصیات:حرکت کا قانون (زاویہ، رفتار، سرعت، رہنے-سے-انڈیکس ٹائم ریشو) مکمل طور پر قابل پروگرام ہے، انتہائی اعلی لچک پیش کرتا ہے۔ اسٹیشنری ہونے پر، لاکنگ سروو موٹر کی برقی مقناطیسی ہولڈنگ فورس (بریک) پر انحصار کرتی ہے۔

3، بنیادی کارکردگی کا موازنہ


4، ایپلیکیشن سلیکشن گائیڈ
منظرنامے پسند کرناکیماشاریہ ساز:
1. تیز-رفتار، بھاری-لوڈ، فکسڈ-سائیکل پروڈکشن لائنز
منظرنامے:
ملٹی-اسٹیشن روٹری اسمبلی مشینیں؛ ہائی-اسپیڈ سٹیمپنگ فیڈر؛ بوتل کی ٹوپی کیپنگ مشینیں؛
بڑے مادی پروسیسنگ ٹرن ٹیبل
وجہ:
تیز رفتار پر انڈیکسر کا استحکام، مکینیکل سیلف لاکنگ کی وشوسنییتا-اور مضبوط اثر مزاحمت اسے ایسے حالات کے لیے ترجیحی انتخاب بناتی ہے۔ اس کا فکسڈ موشن سائیکل آسانی سے خودکار لائن سائیکل کے ساتھ ہم آہنگ ہو جاتا ہے۔
2. سخت سختی کے تقاضوں کے ساتھ درخواستیں۔
منظرنامے:
ٹرن ٹیبل جس میں براہ راست مشینی آپریشن شامل ہوتے ہیں جیسے ملنگ، ڈرلنگ، یا ٹیپنگ۔
وجہ:
مشینی کے دوران آلے اور ورک پیس کے درمیان اہم کاٹنے والی قوتیں موجود ہیں۔ انڈیکسر کے قیام کے دورانیے کی "سخت دیوار" کی خصوصیت مشینی درستگی کو یقینی بنا کر کاٹنے والی قوتوں کی وجہ سے ہونے والی کمپن اور نقل مکانی کو مؤثر طریقے سے روکتی ہے۔
3. نسبتاً سخت ماحول یا لکیریں جن کے لیے انتہائی قابل اعتمادی کی ضرورت ہوتی ہے۔
منظرنامے:
فاؤنڈری، فورجنگ، تیل، دھول، یا درجہ حرارت/نمی کی مختلف حالتوں کے ساتھ کھانے کی پیکیجنگ کے ماحول۔
وجہ:
مکمل طور پر مکینیکل ڈھانچہ سخت ماحول کے لیے زیادہ رواداری پیش کرتا ہے، اس میں ناکامی کے امکانات کم ہوتے ہیں، اور طویل مدتی آپریشنل بھروسہ فراہم کرتا ہے۔
کھوکھلی کو پسند کرنے والے منظرنامے۔اشاریہ سازیمیزیں
1. کثیر-مختلف قسم، چھوٹی-بیچ لچکدار پیداوار
منظرنامے:بار بار مصنوعات کی تبدیلی کے ساتھ معائنہ اسٹیشن، 3C پروڈکٹ ٹیسٹنگ اسٹیشن، ذاتی پیکیجنگ اسٹیشن۔
وجہ:اسٹیشنوں کی تعداد اور اشاریہ سازی کے زاویوں (مثال کے طور پر، غیر-برابر تقسیم) کو سافٹ ویئر کے ذریعے کسی میکانیکل اجزاء کو تبدیل کیے بغیر تیزی سے تبدیل کیا جا سکتا ہے، جس سے تبدیلی کے وقت کو نمایاں طور پر کم کیا جا سکتا ہے۔
2.کمپلیکس موشن پیٹرن یا ویژن کوآرڈینیشن کی ضرورت
منظرنامے:اعلی-صاف بصری معائنہ (مثال کے طور پر، 360 ڈگری ظاہری جانچ)، لیزر اینگریونگ، فالو-قسم ڈسپنسنگ/ویلڈنگ۔
وجہ:"الیکٹرانک کیم" کے افعال کو حاصل کرنے کے لیے میزبان کنٹرولر کے ساتھ حقیقی-وقت میں بات چیت کر سکتے ہیں، گردش کے دوران رفتار یا پوزیشن کی مطابقت پذیری کو فعال کر سکتے ہیں۔ کھوکھلا ڈھانچہ کیمرہ کیبلز یا لیزر ہیڈ لائنوں کے گزرنے میں سہولت فراہم کرتا ہے، کیبل کے الجھنے کو روکتا ہے۔
3.اسپیس-محدود سامان جس کو سنٹرلائزڈ کیبل روٹنگ کی ضرورت ہوتی ہے۔
منظرنامے:روبوٹک آرم اینڈ-آف-آرم روٹری گرپرز، کمپیکٹ ملٹی-اسٹیشن ٹیسٹرز۔
وجہ:کھوکھلی شافٹ نیومیٹک لائنوں، بجلی کے تاروں، اور ویکیوم ٹیوبوں کے لیے ایک بہترین چینل فراہم کرتا ہے، جس کے نتیجے میں سامان صاف ہوتا ہے اور بیرونی حرکت پذیر کیبلز سے مداخلت اور پہننے کو کم کرتا ہے۔
4.خصوصی یا غیر{0}}معیاری اشاریہ سازی کے زاویہ کے تقاضے
منظرنامے:اسٹیشنوں کی طاق تعداد (مثلاً، 5، 7) یا خاص زاویے (مثلاً، 15 ڈگری، 72 ڈگری) کی ضرورت ہے۔
وجہ:خصوصی کیمز کو اپنی مرضی کے مطابق کرنے کی ضرورت نہیں؛ کسی بھی اشاریہ سازی کا زاویہ سافٹ ویئر کی ترتیبات کے ذریعے حاصل کیا جا سکتا ہے، حسب ضرورت لاگت اور وقت کی بچت۔
خلاصہ طور پر، کیم انڈیکسرز اور ہولو انڈیکسنگ ٹیبلز، درست آٹومیشن کے شعبے میں دو بنیادی اجزاء کے طور پر، بالترتیب مکینیکل وشوسنییتا اور میکاٹرونک لچک کی تکنیکی سمتوں کی نمائندگی کرتے ہیں۔ انڈیکسرز تیز-رفتار، ہیوی-لوڈ، ہائی-سختی، اور سخت-ماحول میں فکسڈ-سائیکل پروڈکشن لائنوں کی وجہ سے ان کی خالص میکانی ساخت، تیز-رفتار اور بھاری-لوڈنگ کی صلاحیت، اور خود-تالے لگانے کی خصوصیات۔ اس کے برعکس، کھوکھلی روٹری ٹیبلز، ان کے مکمل طور پر قابل پروگرام موشن کنٹرول، لچکدار زاویہ کی ترتیبات، کھوکھلی روٹنگ کے فوائد، اور اچھی وژن کوآرڈینیشن کی صلاحیتوں کے ساتھ، لچکدار پیداوار، متعدد قسم کی تبدیلیوں، اور پیچیدہ مطابقت پذیر آپریشن کے منظرناموں کے لیے بہتر موزوں ہیں۔ عملی ایپلی کیشنز میں، سازوسامان کی کارکردگی اور پیداوار کی موافقت کو زیادہ سے زیادہ کرنے کے لیے مناسب بنیادی اشاریہ سازی کے طریقہ کار کو سائنسی طور پر پیداواری سائیکل، لوڈ کی صورتحال، ماحولیاتی تقاضوں اور آٹومیشن لچک کی ضرورتوں کی بنیاد پر منتخب کیا جانا چاہیے۔